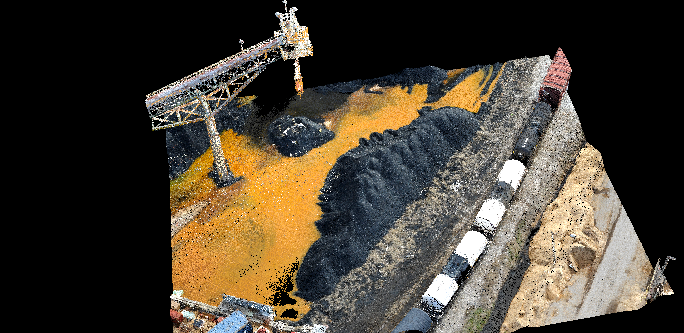
Derived products are what the name implies – analytic data derived from the base TrueView 515 products. These are generated using workflows and tools within LP360 Drone.
Examples of derived products include:
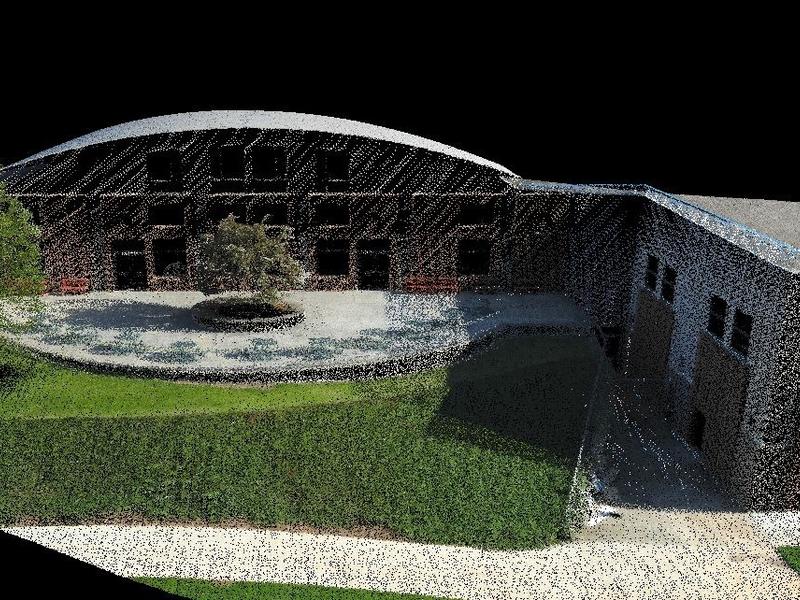
• Classified ground model – 3D LIDAR points that represent bare earth. These are generated using both automatic and manual editing tools in LP360 Drone
• Automatically derived planar surfaces such as building roof prints
• Topographic contours
• Automatic and manual digitized stockpile boundaries (“toes”)
• Volumetric analysis such as stockpile volumes and cut/fill computations
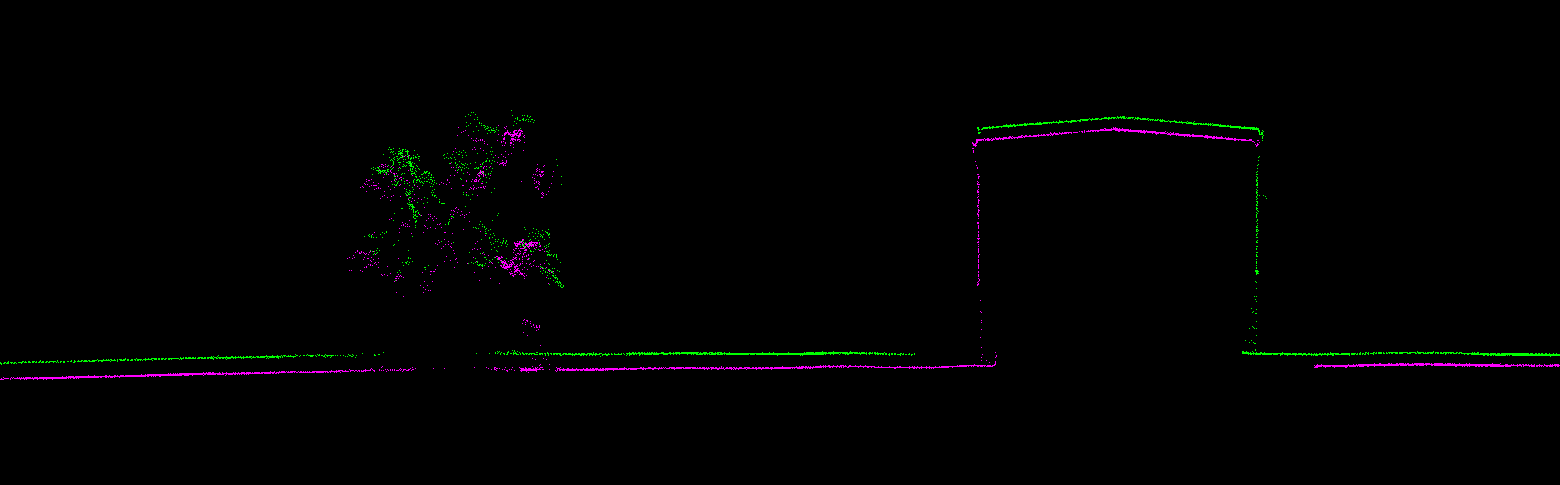
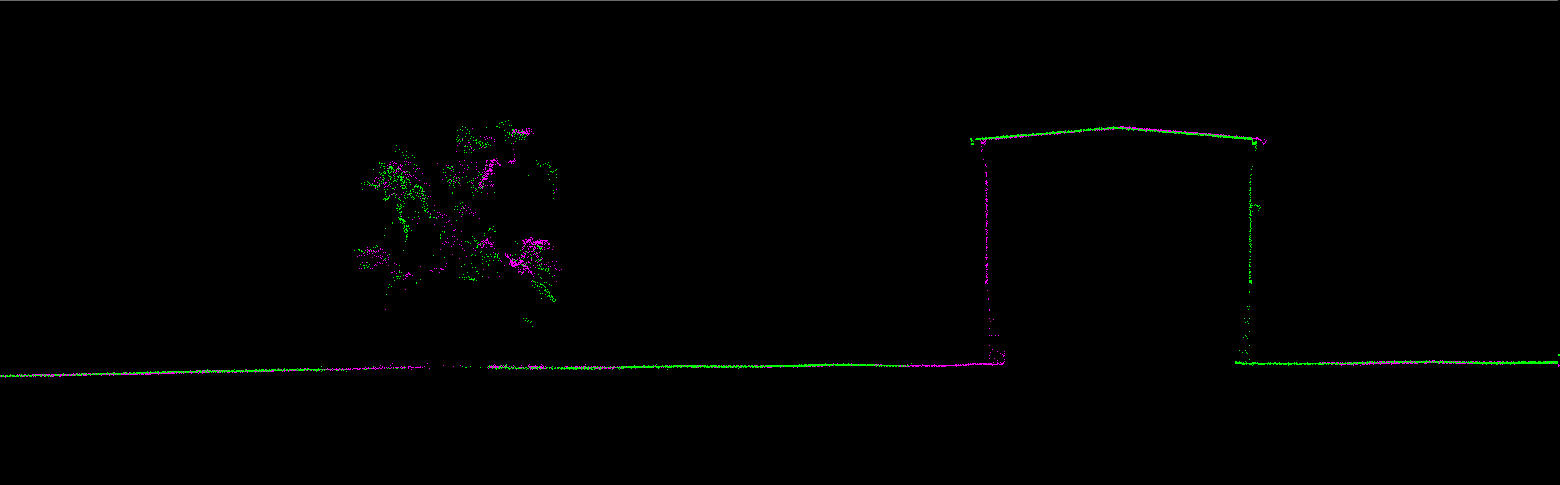
• Profiles and cross sections
• Automatic rail extraction tools (classified rail points, vectorized center line)
• Automatic power line extraction tools (classified wire points, vectorized catenaries)
• Gridded elevation models derived from ground points and first surface points
In addition to the above, LP360 Drone supports feature-constrained (“breakline enforced”) modeling. This allows creation of surface data that is constrained by features such as water body boundaries, edge of pavement, downstream flow, retaining walls and so forth.